डॉ. जियोवानी चेट्टा द्वारा संपादित
मनुष्य की विशिष्ट गति
मनुष्य की विशिष्ट गति को गतिशील, ऊर्जावान और सूचनात्मक घटनाओं के सेट के रूप में परिभाषित किया जा सकता है जो द्विपाद वैकल्पिक चाल (प्रगति के साथ गति) और स्थायी स्थिति (प्रगति के बिना गति) में परिवर्तित होते हैं।
केंद्रीय तंत्रिका तंत्र की सभी संरचनाओं में, एक चौथाई से अधिक प्रत्यक्ष रूप से और आधे से अधिक अप्रत्यक्ष रूप से आंदोलनों की योजना और निष्पादन में भाग लेते हैं; इसलिए, मनुष्य, अपनी 650 मांसपेशियों और 206 हड्डियों के साथ, मुख्य रूप से एक "मोटर जानवर" है।
वास्तव में, मनुष्य को अपने अस्तित्व और कल्याण के लिए आगे बढ़ने की जरूरत है।इस कारण से, हरकत वह गतिविधि है जो अन्य सभी पर पूर्वता लेती है। वास्तव में, जीवन की दुनिया में उच्चतम स्तर पर मनुष्य की विशिष्ट गति होती है, जो सबसे जटिल प्राकृतिक प्रक्रिया का प्रतिनिधित्व करती है। वे द्विपद रूपात्मक-यांत्रिक स्थिति के अधिग्रहण में पहली उत्पत्ति को पहचानते हैं; हाथों की मुक्ति इसी का परिणाम है (पैपरेला ट्रेकिया, 1988)। मोटर कार्य और शरीर, जिसे कई संस्कृतियों में हीन संस्थाओं के रूप में माना जाता है और संज्ञानात्मक गतिविधियों और मन के अधीन है, इसके बजाय उन अमूर्त व्यवहारों के मूल में हैं, जिन पर हमें गर्व है, जिसमें वह भाषा भी शामिल है जो हमारे दिमाग और हमारे विचारों को बनाती है ( ओलिविएरो, 2001) भ्रूण, भ्रूण और बचपन के प्रारंभिक चरणों में, क्रिया संवेदना से पहले होती है: प्रतिवर्त आंदोलनों को बनाया जाता है और फिर उन्हें माना जाता है। यह प्रोप्रियोसेप्टिव रिफ्लेक्सिस से है कि मानसिक प्रतिनिधित्व (एनग्राम) पैदा होते हैं जो जटिल मोटर कौशल और समान विचारों के जन्म की अनुमति देते हैं। महत्वपूर्ण क्षणों (गहन तनाव) में, पेशी प्रणाली एक उच्च प्राथमिकता प्रणाली का गठन करती है: सक्रिय होने पर, अन्य सिस्टम, जैसे कि संवेदनाओं, ध्यान, संज्ञानात्मक गतिविधियों आदि की धारणा के लिए जिम्मेदार, सापेक्ष रुकावट की स्थिति में हैं, क्योंकि यह राज्य "अचेतन" में जीवित रहने के लिए महत्वपूर्ण कार्यों के निष्पादन से जुड़ा हुआ है, जैसे कि पलायन , हमला, भोजन की तलाश, यौन साथी के लिए, घोंसले के लिए। अंत में, आज हम जानते हैं कि प्राकृतिक आवास में सरल चलना दो मस्तिष्क गोलार्द्धों का एक बहुत शक्तिशाली पुनर्संतुलन है।
इसलिए वर्तमान मानव शरीर स्वाभाविक रूप से असमान जमीन पर गुरुत्वाकर्षण क्षेत्र में दो फीट पर अधिकतम दक्षता की सैर करने की आवश्यकता के सभी परिणामों से ऊपर है। इस सिद्धांत के अनुसार, मनुष्य को ऊर्जा की न्यूनतम खपत के साथ चलने में सक्षम होना चाहिए "एक निरंतर गुरुत्वाकर्षण क्षेत्र के आंतरिक भाग में, इस परिणाम के साथ कि चलने के दौरान विभिन्न संरचनाएं (मांसपेशियों, हड्डियों, स्नायुबंधन, टेंडन, आदि) न्यूनतम तनाव के अधीन होती हैं।

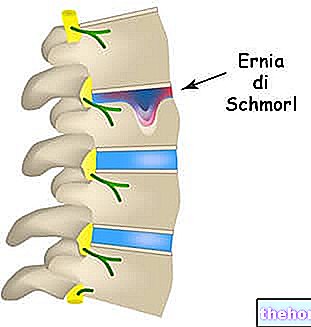
- NS पहलू और इंटरवर्टेब्रल डिस्क वे रोटेशन को नहीं रोकते बल्कि इसके पक्ष में हैं; कशेरुक स्थिर संरचनात्मक स्थिरता के लिए नहीं बनाए गए थे। वास्तव में, काठ का लॉर्डोसिस पार्श्व फ्लेक्सन के साथ यांत्रिक रूप से यांत्रिक टोक़ प्रणाली के माध्यम से, कशेरुक स्तंभ के एक मरोड़ को प्रेरित करता है।
- की भूमिका निचले अंग यह रीढ़ की हड्डी के लिए माध्यमिक है। वे अकेले गति की अनुमति देने के लिए श्रोणि को घुमाने में असमर्थ हैं, लेकिन वे इसकी गति को बढ़ा सकते हैं।
निचले अंग, वास्तव में, मानव गति की गति को विकसित करने के लिए विकासवादी आवश्यकता से प्राप्त होते हैं। इस उद्देश्य के लिए आवश्यक अधिक शक्ति ट्रंक की मांसपेशियों से प्राप्त नहीं हो सकती है, जिसके लिए इस उद्देश्य के लिए एक द्रव्यमान विकसित करना होगा जो असंभव था "पदचिह्न" के दृष्टिकोण से। इसलिए विकास को अतिरिक्त मांसपेशियों को तैयार करना पड़ा, उन्हें कार्यात्मक और स्थानिक दोनों कारणों से, ट्रंक के बाहर, यानी निचले अंगों पर रखना। इसलिए निचले अंगों का पहला कार्य ऊर्जा प्रदान करना है जो हमें उच्च गति से आगे बढ़ने की अनुमति देता है। उनके लिए धन्यवाद, इंटरवर्टेब्रल आंदोलनों, विशेष रूप से अनुप्रस्थ तल पर घुमाव, हैमस्ट्रिंग मांसपेशियों (हैमस्ट्रिंग, सेमीटेंडिनोसस और सेमीमेम्ब्रानस) के पूरक योगदान का लाभ उठा सकते हैं, जिससे रीढ़ विशिष्ट और काफी शारीरिक मायोफेशियल श्रृंखलाओं से जुड़ी होती है:
- सैक्रोट्यूबेरस लिगामेंट-लोंगिसिमस लम्बोरम मांसपेशी (रीढ़ के किनारों पर स्थित)
- सैक्रोट्यूबेरस लिगामेंट और इलियोकोस्टलिस थोरैसिस (इस तरह दाहिनी हैमस्ट्रिंग मांसपेशियां बाएं वक्ष की मांसपेशियों के हिस्से को नियंत्रित करती हैं और इसके विपरीत),
- ग्लूटस मैक्सिमस मांसपेशियां - विपरीत महान पृष्ठीय मांसपेशियां (जो बदले में ऊपरी अंगों की गति को नियंत्रित करती हैं)।




इसलिए पैर मेहराब या वाल्ट की प्रणाली नहीं है, बल्कि एक बहुत ही परिष्कृत हेलिकॉएडल संवेदी-मोटर प्रणाली (पैपरेला ट्रेकिया, 1978) भी है।
"मानव पैर एक" कला का काम और इंजीनियरिंग की उत्कृष्ट कृति है "
माइकल एंजेलो बुओनारोटिक
पैर एक संवेदी-मोटर अंग है, जो सिस्टम और पर्यावरण के बीच एक पुल है, जिसमें "26 हड्डियों, 33 जोड़ों और 20 मांसपेशियों से बना चर पिच हेलिक्स शामिल है जो पूरे शरीर को प्रभावित करता है।
जब घुटना मोड़ में होता है, तो पैर की गति दोनों पार्श्व (टखने पर 1-2 सेमी) और अक्षीय घुमाव (5 ° का बाहरी घुमाव) दोनों में संभव है। जमीन की असमानता के संबंध में पैर के इष्टतम समर्थन की अनुमति देने के लिए यह आवश्यक है। पूर्ण विस्तार में, दूसरी ओर, घुटने, महत्वपूर्ण भार बलों के अधीन होने के कारण, शारीरिक स्थितियों में, एक महान स्थिरता प्रस्तुत करता है; इसलिए एक संयुक्त ब्लॉक होता है जो टिबिया को फीमर (कपंडजी, 2002) में एकजुट करता है। इसलिए, फ्लेक्सन की स्थिति में, घुटने पैर और पैर के घुमावों को "फ़िल्टर" करने में सक्षम होते हैं, जबकि जब यह पूरी तरह से विस्तारित होता है, तो ये घुमाव होते हैं फीमर को एकीकृत रूप से स्थानांतरित किया जाता है, जिसके परिणामस्वरूप पेल्विक गर्डल (विशेष रूप से, कॉक्सो-फेमोरल जोड़ और टेलस-स्केफॉइड जोड़ समान रूप से संरचित और संगत रूप से व्यवस्थित होते हैं) को प्रभावित करते हैं।

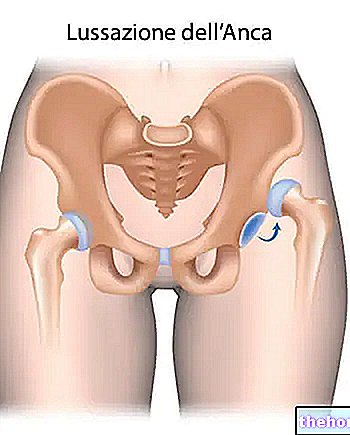
संदर्भ स्थिति में कूल्हे के स्नायुबंधन मध्यम रूप से तनावपूर्ण होते हैं। बाहरी घुमाव में सभी मजबूत पूर्वकाल स्नायुबंधन तनावपूर्ण होते हैं (क्षैतिज बंडलों के स्तर पर तनाव अधिकतम होता है, यानी इलियो-प्रीट्रोकैनेटरिक और प्यूबो-फेमोरल लिगामेंट) जबकि वे पोस्टीरियर (इस्किओ-फेमोरल लिगामेंट) को रोक दिया जाता है। आंतरिक रोटेशन में, रिवर्स होता है, इस्चियो-फेमोरल लिगामेंट खिंच जाता है जबकि पूर्वकाल स्नायुबंधन (कपंडजी, 2002) जारी होते हैं।


अनुप्रस्थ और ललाट तल में घुमावों के बीच का अनुपात सुनहरे नंबर की ओर जाता है सुनहरा अनुभाग, साथ ही विभिन्न कंकाल भागों (जैसे हिंदफुट / फोरफुट लंबाई) के बीच की लंबाई का अनुपात।
'मनुष्य की विशिष्ट गति, प्रकृति में सबसे प्रशंसनीय प्रक्रियाओं में से एक, घूमते हुए स्तंभों, स्वर्ण संख्या के संरक्षक, अपने आप में और पारस्परिक संबंधों में खड़ी है "(पैपरेला ट्रेकिया, 1988)।
अस्थायी आरक्षित गोदाम के रूप में गुरुत्वाकर्षण क्षेत्र का उपयोग करते हुए, मनुष्य की विशिष्ट गति अधिकतम ऊर्जा दक्षता की होती है: प्रत्येक चरण में, गुरुत्वाकर्षण के केंद्र (मंदी चरण) के आरोहण के दौरान, गतिज ऊर्जा को तब के लिए संभावित ऊर्जा के रूप में संग्रहीत किया जाता है। बाद में गुरुत्वाकर्षण के केंद्र के अवतरण के दौरान गतिज ऊर्जा में परिवर्तित हो जाते हैं, शरीर को आगे बढ़ाते हैं और गुरुत्वाकर्षण के केंद्र को ऊपर उठाते हैं।

प्रोपेलर की स्तुति


' यदि किसी आकृति को ईश्वर ने रूपों में उसकी निरंतरता की गतिशील नींव के रूप में चुना है, तो यह आंकड़ा हेलिक्स है "(गोएथे)
वहां गुरुत्वाकर्षण का बलकार्यात्मक और संरचनात्मक दोनों ही दृष्टि से, इसलिए इसे शत्रु के रूप में नहीं देखा जाना चाहिए; इसके बिना मनुष्य का अस्तित्व नहीं हो सकता।
"मानव गति और" ब्रीच समर्थन "के महत्व पर अन्य लेख
- मुद्रा और तनाव
- स्कोलियोसिस - कारण और परिणाम
- स्कोलियोसिस निदान
- स्कोलियोसिस का पूर्वानुमान
- स्कोलियोसिस का उपचार
- एक्स्ट्रा-सेलुलर मैट्रिक्स - संरचना और कार्य
- संयोजी ऊतक और संयोजी प्रावरणी
- कनेक्टिव बैंड - विशेषताएं और कार्य
- सही ब्रीच और occlusal समर्थन का महत्व
- इडियोपैथिक स्कोलियोसिस - दूर करने के लिए मिथक
- स्कोलियोसिस और चिकित्सीय प्रोटोकॉल का नैदानिक मामला
- उपचार के परिणाम क्लिनिकल केस स्कोलियोसिस
- एक प्राकृतिक दृष्टिकोण के रूप में स्कोलियोसिस - ग्रंथ सूची











.jpg)